Diseño CAD
Diseño CAD
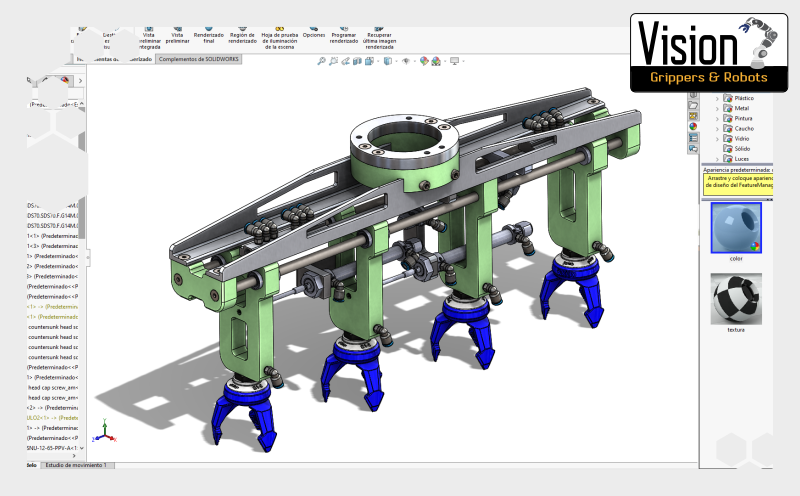
Soluciones de ingeniería en el área de Diseño CAD. (Empresa certificada SolidWorks Professional CSWP).
▪ Diseño de piezas, herramientas, Grippers y Toolings con aplicaciones en robótica industrial y robótica colaborativa.
▪ Simulación de movimientos y cálculo de esfuerzos.
▪ Elaboración de planos para la fabricación de piezas y lista de materiales para ensambles.
▪ Diseño de celdas robóticas.
▪ Diseño de bases y plataformas para robots industriales.


